CAN 总线配置
在此窗口中可以执行四种不同的 CAN 总线配置任务:
|
| ▸
|
定义应发送到 CAN 总线上的设备的信号(测量值)。 |
|
| ▸
|
识别可能从 CAN 总线接收的每种类型的消息。 |
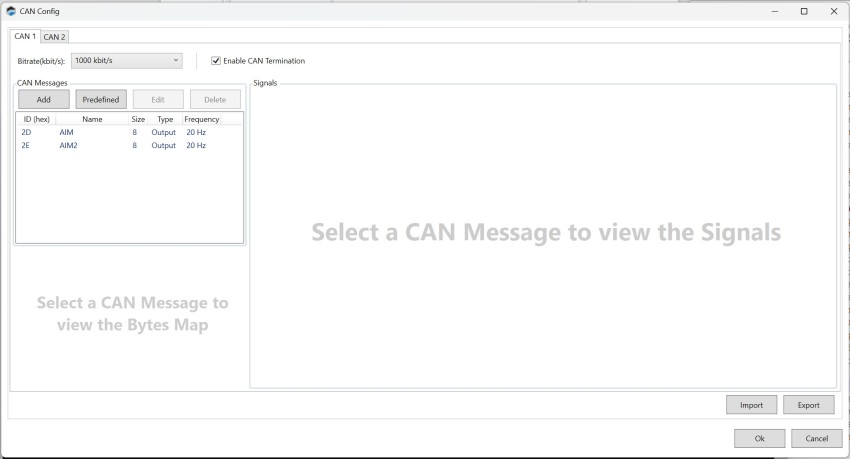
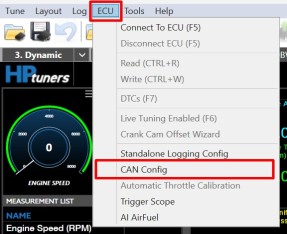
要打开此窗口,请选择 ECU > CAN 配置 在菜单栏中。
注意: 这个 预定义 按钮仅用于配置 TurboLamik TCM。
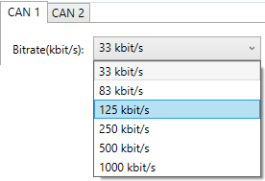
设置 CAN 总线比特率
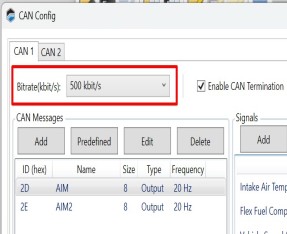
这个 比特率 窗口顶部的下拉菜单用于设置 CAN 总线的比特率。总线上的所有设备必须使用相同的比特率。
CAN 总线终端
CAN 总线必须有两个终端电阻,每端一个。如果您希望使用 ECU 作为端点之一:

|
| 2.
|
确保总线上有一个(且只有一个)其他终端电阻。 |
如果 CAN 总线上已有两个终端电阻,请取消选中 启用 CAN 终端 框。这允许 ECU 充当网络中间的一个节点。
将数据发送到 CAN 总线上的设备
可以将任何 ECU 测量结果发送到 CAN 总线上的任何其他设备。对于需要传输的每个参数,请按照以下步骤操作:
|
| 1.
|
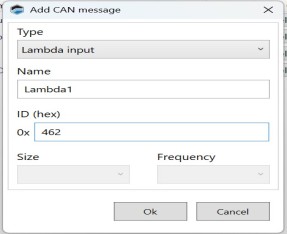
点击 添加 按钮。出现添加 CAN 消息窗口。 |

|
| ▸
|
ID(十六进制): 消息的数字 ID。这在 CAN 网络上必须是唯一的,并且还代表消息优先级(数字越小,优先级越高)。 |
|
| 4.
|
新消息现在将列在 CAN 消息组中。在列表中选择新消息(单击它)。 |
|
| 5.
|
添加将在此消息中发送的测量值。对于要添加的每个测量值: |
|
| b.
|
双击要添加的测量。所选测量现在将出现在测量列表中。 |
|
| c.
|
在消息中配置此测量的格式。请参阅 测量格式 . |
从 CAN 总线接收消息
来自 CAN 总线的消息可以映射到多个预定义输入中的任何一个。请按照以下步骤操作:
|
| 1.
|
点击 添加 按钮。出现添加 CAN 消息窗口。 |

|
| ▸
|
ID(十六进制): 消息的数字 ID。这在 CAN 网络上必须是唯一的,并且还代表消息优先级(数字越小,优先级越高)。 |
|
| ▸
|
类型: 对于已接收消息,通常应设置为“输入”。但是,如果您正在配置基于 CAN 的氧传感器,选择“氧传感器输入”将简化该传感器的 CAN 配置(您可以根据传感器制造商选择预定义的配置)。 |
|
| ▸
|
长度: 此消息中的字节数。(不适用于 Lambda 输入)。 |
|
| ▸
|
频率: 每秒应发送此消息的次数。(不适用于 Lambda 输入)。 |
|
| 4.
|
新消息现在将列在 CAN 消息组中。在列表中选择新消息(单击它)。 |
|
| 5.
|
指定此消息将映射到的输入。对于要映射的每个输入: |
|
| a.
|
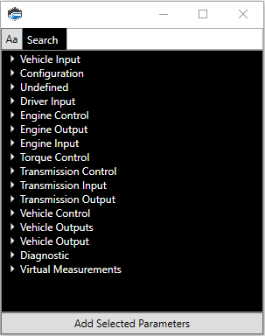
点击 添加 在测量组中。将显示可用输入列表。 |

|
| b.
|
双击您想要使用的输入。所选输入现在将出现在测量列表中。 |
|
| c.
|
配置此输入的数据格式。对于氧传感器组 1 和组 2,只需在测量列表中选择氧传感器类型即可。对于所有其他测量,请参阅 测量格式下文。 |
测量格式
有许多设置可以格式化测量列表中的每个项目。

当您配置这些设置时,您可以在窗口的左下角看到您正在配置的位格式。
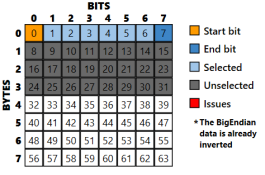
蓝色和橙色位代表您在窗口右侧的测量列表中选择的行。
如果位为红色,则表示配置存在问题。例如,如果您指出第一次测量占用 11 位,但第二次测量从第 8 位开始,则数据会重叠。
起始位
本次测量开始于消息的位。例如,如果消息中的第一个测量从位 0 开始,且宽度为 8 位,则它将占用位 0 至位 7。因此,第二次测量可能从位 8 开始。
宽度
用于编码此测量值的位数。
字节顺序
指示最高有效位是本次测量的第一位还是最后一位。
|
| ▸
|
英特尔。 最高有效位存储在最后(小端)。这通常是英特尔处理器的情况。 |
|
| ▸
|
摩托罗拉。 最高有效位首先存储(大端字节序)。摩托罗拉处理器通常采用这种存储方式。 |
类型
增益和偏移
CAN 消息使用这些值来优化数据编码方式。
发送消息(输出消息)时,实际编码的测量值等于:
接收消息(输入消息)时,通过对接收的值应用以下公式来计算要使用的值:
分钟
此参数允许的最小值。
注意: 点击 计算最小值和最大值 告诉 VCM Live 根据此行中的其他配置自动计算这些值
max.
此参数的最大允许值。
CAN Lambda
以下步骤概述了设置 CAN Lambda 的推荐程序。
注意: CORE 仅支持 Motec LTC CAN Lambda 监视器。
|
| 1.
|
在菜单栏上选择“ECU”>“CAN Config”,将出现CAN Config窗口。 |
|
| 3.
|
使用 Motec LTC 模块监视器的相应值填写字段,请参阅 Motec 的规格文档。 |
注意: “DLC”和“频率”字段不会用于 CAN Lambda。
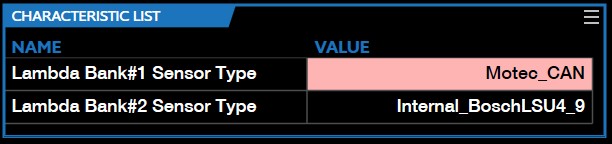
注意: 如果您选择了 Lambda 输入类型,则将仅列出 2 个选项:Lambda 传感器组 1 和 Lambda 传感器组 2。
注意: 每个 Lambda 传感器组都需要一条单独的消息,并且每个 CONFIG 最多允许 2 条 Lambda 消息。
|
| 6.
|
将“Lambda Bank #1 Sensor Type”参数值更改为“Motec_CAN”。 |